
 Email
Email LinkedIn
LinkedIn Twitter
TwitterModel-Free Control
Assumption:
- unknown MDP. You know the states, but you don't know the transition probabilities and the reward function
- All states must be visited enough times.
Goal. We want to find the optimal policy.
There are two main strategies, namely on-policy learning (learning by doing) and off-policy learning (learning from someone else's policy)
On-Policy Learning
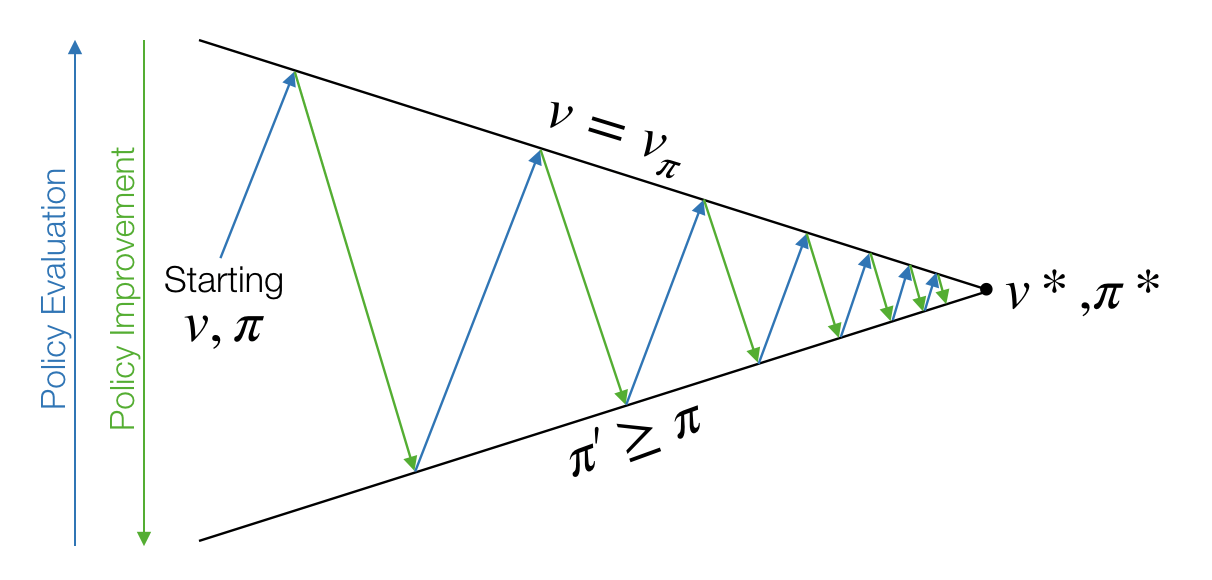
The main idea is to use Generalized Policy Iteration, which consists of iteratively applying two steps, viz. policy evaluation (computing the value of a policy) and policy improvement.
On-Policy - Trial 1: Generalized Policy Iteration with Monte-Carlo Evaluation
Policy Evaluation Monte-Carlo policy evaluation on state-value function.
Policy Improvement Greedy policy improvement $\pi(s)=\arg\max_a R_s^a + \gamma\sum_{s'}P_{ss'}^a v(s')$.
Problem 1. This solution is not model-free. You need $P$.
Problem 2. Deterministic policy has issues about exploration.
On-Policy - Trial 2: Generalized Policy Iteration with Action-Value Function
If you use the action-value function, you can do control without needing the model
Policy Evaluation Monte-Carlo policy evaluation on action-value function.
Policy Improvement Greedy policy improvement $\pi(s)=\arg\max_a q(a,s)$.
Problem 2. Deterministic policy has issues about exploration.
Consider a case with two possible actions. One of them gives small reward at each timestep, while the other one gives huge and rare rewards.
A greedy policy always selects the action with small and frequent reward, but it's not guaranteed to be optimal.
On-policy - Trial 3: Monte-Carlo Policy Iteration
Policy Evaluation Monte-Carlo policy evaluation on action-value function.
$$\pi'(a|s)=\left\{\begin{array}{ll} 1-\epsilon+\frac{\epsilon}{m} & if a=\arg\max_{a'}q_\pi(a',s) \\ \frac{\epsilon}{m} & otherwise \end{array}\right.$$
Policy Improvement $\epsilon$-Greedy exploration, namely choose greedy action with probability $1-\epsilon$ or choose all other actions with probability $\epsilon$. Therefore
Theorem. $\epsilon$-greedy exploration improves the policy, namely $v_{\pi'}(s)\geq v_\pi(s)$.
Proof. $$\begin{align}
\sum_{a}\pi'(a|s)q_\pi(a,s) &= (1-\epsilon)\max_a q_\pi(a,s) + \frac{\epsilon}{m}\sum_a q_\pi(a,s) \\
&\geq (1-\epsilon)\sum_a \pi^{''}(a|s) q_\pi(a,s) + \frac{\epsilon}{m}\sum_a q_\pi(a,s) \quad\text{where}\quad \pi^{''}(a|s)=\frac{\pi(a|s)-\epsilon/m}{1-\epsilon} \\
&= (1-\epsilon)\sum_a \frac{\pi(a|s)-\epsilon/m}{1-\epsilon}q_\pi(a,s) + \frac{\epsilon}{m}\sum_a q_\pi(a,s)\\
&= \sum_{a}\pi(a|s)q_\pi(a,s)
\end{align}$$
QED
Problem. This is a bit inefficient, because we evaluate a policy on multiple episodes. If the policy is bad, we spend too much time on evaluating that bad policy.
On-policy - Trial 4: Monte-Carlo Control
Same as Monte-Carlo Policy Iteration but you evaluate the policy on just a single episode.
Policy Evaluation Monte-Carlo policy evaluation on action-value function on single episode. $q(a,s)\approx q_\pi(a,s)$.
$$\pi'(a|s)=\left\{\begin{array}{ll} 1-\epsilon+\frac{\epsilon}{m} & if a=\arg\max_{a'}q(a',s) \\ \frac{\epsilon}{m} & otherwise \end{array}\right.$$
Policy Improvement $\epsilon$-Greedy exploration, namely choose greedy action with probability $1-\epsilon$ or choose all other actions with probability $\epsilon$. Therefore
Problem. Note that policy evaluation is performed on a single episode (and not an infinite set of episodes), which obtains only an approximation of the action-value function. The subsequent policy improvement is based on this estimation. Are we guaranteed to find the optimal policy?
On-policy - Solution 1: GLIE Monte-Carlo Control
In order to ensure convergence to the optimal policy, we need to satisfy two conditions:
GLIE (Greedy in the Limit of Infinite Exploration).
- All state-action pairs must be explored infinitely many times (in order not to discard any of them), namely $\lim_{t\rightarrow\infty}N_t(a,s)=\infty$.
- The final policy must be greedy (deterministic), $\lim_{t\rightarrow\infty}\pi_t(a|s)=1[a=\arg\max_{a'}q_t(a',s)]$.
Note that the GLIE property can be ensure by choosing $\epsilon=1/t$.
Policy Evaluation Monte-Carlo policy evaluation on action-value function on single episode.
$$\begin{align}\text{for each pair of state,} & \text{ action in the episode} \\ & N(A_t,S_t)=N(A_t,S_t)+1 \\ & q(S_t,A_t)=q(S_t,A_t) + \frac{1}{N(A_t,S_t)}\big(G_t-q(S_t,A_t)\big)\end{align}$$
Policy Improvement $\epsilon$-Greedy exploration, namely choose greedy action with probability $1-\epsilon$ or choose all other actions with probability $\epsilon$. Therefore
$$\pi'(a|s)=\left\{\begin{array}{ll} 1-\epsilon+\frac{\epsilon}{m} & if a=\arg\max_{a'}q(a',s) \\ \frac{\epsilon}{m} & otherwise \end{array}\right.$$
Choose $\epsilon=1/t$.
Theorem. GLIE Monte-Carlo control converges to the optimal action-value function as long as the number of collected episodes is large enough, namely $q(A_t,S_t)\rightarrow q^*(A_t,S_t)$ for $t\rightarrow\infty$.
Proof. NOT HERE
On-policy - Solution 2: Control with Sarsa
We want to have an online algorithm.
Recall that MC policy evaluation uses $q(S_t,A_t)=q(S_t,A_t) + \alpha\big(G_t-q(S_t,A_t)\big)$.
Then, we can replace $G_t$ with the TD target $R_{t+1}+\gamma q(S_{t+1},A_{t+1})$ and obtain Sarsa.
(In fact, recall that $q_\pi(a,s)=R_s^a+\gamma\sum_{s'}P_{ss'}^a\sum_{a'}\pi(a'|s')q_\pi(a',s')$).
Policy Evaluation online policy evaluation on action-value function.
$$q(S_t,A_t)=q(S_t,A_t) + \alpha\big(R_{t+1}+\gamma q(S_{t+1},A_{t+1})-q(S_t,A_t)\big)$$
Policy Improvement $\epsilon$-Greedy exploration, namely choose greedy action with probability $1-\epsilon$ or choose all other actions with probability $\epsilon$. Therefore $$\pi'(a|s)=\left\{\begin{array}{ll} 1-\epsilon+\frac{\epsilon}{m} & if a=\arg\max_{a'}q(a',s) \\ \frac{\epsilon}{m} & otherwise \end{array}\right.$$ Choose $\epsilon=1/t$.
Theorem. Assume that
- We have GLIE policies
- The sequence of $\alpha_t$ satisfies the Robbins Monro conditions:
- $\sum_{t=1}^\infty \alpha_t = \infty$ (meaning that we are able to move our estimate $q(s,a)$ wherever we want).
- $\sum_{t=1}^\infty\alpha_t^2<\infty$ (meaning that the changes eventually diminish).
Then, Sarsa converges to optimal action-value function.
Proof. NOT HERE
Question. Can we unify the last two solutions?
On-policy - Solution 3: Control with n-Step Sarsa
We can replace $G_t$ with the n-step TD target $q_t^{(n)}=R_{t+1}+\gamma R_{t+2} + \dots + \gamma^{n}q(S_{t+n},A_{t+n})$
Policy Evaluation policy evaluation on action-value function
$$q(S_t,A_t)=q(S_t,A_t) + \alpha\big(q_t^{(n)}-q(S_t,A_t)\big)$$
Policy Improvement $\epsilon$-Greedy exploration, namely choose greedy action with probability $1-\epsilon$ or choose all other actions with probability $\epsilon$. Therefore
$$\pi'(a|s)=\left\{\begin{array}{ll} 1-\epsilon+\frac{\epsilon}{m} & if a=\arg\max_{a'}q(a',s) \\ \frac{\epsilon}{m} & otherwise \end{array}\right.$$Choose $\epsilon=1/t$.
Question. Which $n$ is the best?
On-policy - Solution 4: Control with Sarsa($\lambda$)
Combine all $n$
Policy Evaluation policy evaluation on action-value function.
$$q(S_t,A_t)=q(S_t,A_t) + \alpha\big(q_t^{\lambda}-q(S_t,A_t)\big)$$
where $q_t^{\lambda}=(1-\lambda)\sum_{n=1}^\infty \lambda^{n-1}q_t^{(n)}$.Policy Improvement $\epsilon$-Greedy exploration, namely choose greedy action with probability $1-\epsilon$ or choose all other actions with probability $\epsilon$. Therefore
$$\pi'(a|s)=\left\{\begin{array}{ll} 1-\epsilon+\frac{\epsilon}{m} & if a=\arg\max_{a'}q(a',s) \\ \frac{\epsilon}{m} & otherwise \end{array}\right.$$
Choose $\epsilon=1/t$.
Question. How to make it online?
On-policy - Solution 5: Control with Online Sarsa($\lambda$)
Define an eligibility trace, namely:
$$E_0(a,s)=0$$$$E_t(a,s)=\gamma\lambda E_{t-1}(a,s) + 1[S_t=s, A_t=a]$$
Then,
Policy Evaluation policy evaluation on action-value function.
$$q(S_t,A_t)=q(S_t,A_t) + \alpha\delta_tE_t(S_t,A_t)$$
where $\delta_t=R_{t+1}+\gamma q(S_{t+1},A_{t+1})-q(S_t,A_t)$.
$$\pi'(a|s)=\left\{\begin{array}{ll} 1-\epsilon+\frac{\epsilon}{m} & if a=\arg\max_{a'}q(a',s) \\ \frac{\epsilon}{m} & otherwise \end{array}\right.$$
Policy Improvement $\epsilon$-Greedy exploration, namely choose greedy action with probability $1-\epsilon$ or choose all other actions with probability $\epsilon$. Therefore
Choose $\epsilon=1/t$.
Off-Policy Learning
We have a behaviour policy $\mu$ (the one which really acts in the environment) and a target policy $\pi$, which we want to know its state-value function.
Why?
- The behaviour policy can be from other agents (e.g. humans)
- Re-use experience from old policies
- Following exploratory policy and learn the optimal one
- Follow one policy and learn multiple ones
Importance sampling. Imagine you have 2 distributions $P$ and $Q$. Then
$$\begin{align}E_{X\sim P}\{f(X)\} &= \sum P(X)f(X) \\ &= \sum P(X)\frac{Q(X)}{Q(X)}f(X) \\ &= \sum Q(X)\bigg(\frac{P(X)}{Q(X)}f(x)\bigg) \\ &= E_{X\sim Q}\bigg\{\frac{P(X)}{Q(X)}f(x)\bigg\}\end{align}$$
The quantity we want to estimate is $G_t$.
Trial 1: Off-Policy Monte Carlo
We take actions using $\mu$ and we estimate $G_t$ by importance sampling over the actions.
$$\begin{align}G_t^{\pi/\mu} &= \frac{\pi(A_t,A_{t+1},\dots,A_T|S_t,S_{t+1},\dots,S_T)}{\mu(A_t,A_{t+1},\dots,A_T|S_t,S_{t+1},\dots,S_T)}G_t \\ &=\frac{\pi(A_t|S_t,S_{t+1},\dots,S_T)\pi(A_{t+1}|S_t,S_{t+1},\dots,S_T)\dots\pi(A_T|S_t,S_{t+1},\dots,S_T)}{\mu(A_t|S_t,S_{t+1},\dots,S_T)\mu(A_{t+1}|S_t,S_{t+1},\dots,S_T)\dots\mu(A_T|S_t,S_{t+1},\dots,S_T)}G_t \\ &=\frac{\pi(A_t|S_t)\pi(A_{t+1}|S_{t+1})\dots\pi(A_T|S_T)}{\mu(A_t|S_t)\mu(A_{t+1}|S_{t+1})\dots\mu(A_T|S_T)}G_t\end{align}$$and the update is
$$v(S_t)=v(S_t)+\alpha\big(G_t^{\pi/\mu}-v(S_t)\big)$$The main problem with this algorithm is that the estimator has too high variance!
In practice, Monte Carlo is never used for off-policy learning.
Solution 1: Off-Policy Temporal Difference
We take actions using $\mu$ and we estimate $G_t$ by importance sampling over the actions.
$$G_t^{\pi/\mu}=\frac{\pi(A_t|S_t)}{\mu(A_t|S_t)}\big(R_{t+1}+\gamma v(S_{t+1})\big)$$and the update is
$$v(S_t)=v(S_t)+\alpha\big(G_t^{\pi/\mu}-v(S_t)\big)$$This solution has much less variance compared to off-policy MC.
Solution 2: General Q-Learning
We don't need to use importance sampling. In fact, we can use a behaviour policy $\mu$ to act in the environment. And we update the TD target using an alternative action from target policy $\pi$.
$$q(S_t,A_t)=q(S_t,A_t) + \alpha\big(R_{t+1}+\gamma q(S_{t+1},A_{t+1})-q(S_t,A_t)\big)$$where $A_{t+1}=\arg \max_a q(S_{t+1},a)$ (from policy $\pi$). Therefore,
$$q(S_t,A_t)=q(S_t,A_t) + \alpha\big(R_{t+1}+\gamma \max_a q(S_{t+1},a)-q(S_t,A_t)\big)$$Solution 3: Special case of Q-Learning (Sarsa MAX)
Here, we have a special case of Q-Learning. Case where we want learn a greedy behaviour following an explorative behaviour. In fact, behaviour policy $\mu$ is $\epsilon$-greedy, while the target policy $\pi$ is greedy.
Policy Evaluation policy evaluation on action-value function.
$$q(S_t,A_t)=q(S_t,A_t) + \alpha\big(R_{t+1}+\gamma \max_a q(S_{t+1},a)-q(S_t,A_t)\big)$$
Policy Improvement $\epsilon$-Greedy exploration, namely choose greedy action with probability $1-\epsilon$ or choose all other actions with probability $\epsilon$. Therefore
$$\mu'(a|s)=\left\{\begin{array}{ll} 1-\epsilon+\frac{\epsilon}{m} & if a=\arg\max_{a'}q(a',s) \\ \frac{\epsilon}{m} & otherwise \end{array}\right.$$
Theorem. Sarsa MAX converges to optimal action-value function. (In fact, it fulfills the GLIE property)
Proof. NOT HERE